
이석주 교수 연구팀, 3차원 지도 기술 개발
기존보다 최대 10배 고해상도 구현
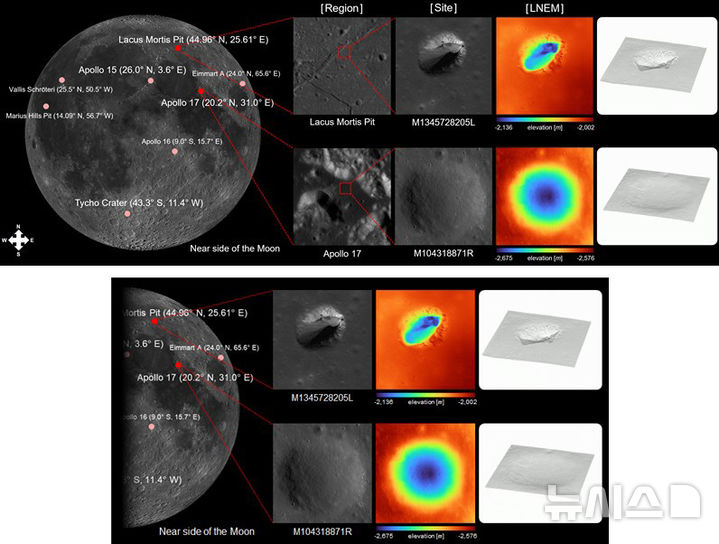
AI로 그린 3차원 달 지도. 실제 달 궤도선 영상으로부터 월면의 고정밀 3차원 지형을 재구성한 모습으로 오른쪽은 LNEM이 생성한 지형도와 이를 기반으로 제작한 3차원 출력 결과를 보여준다. (그래픽=켄텍 제공) [email protected] *재판매 및 DB 금지
[광주=뉴시스]이창우 기자 = 인공지능(AI)을 활용해 달 표면의 고정밀 3차원 지도를 생성하는 기술이 나왔다.
17일 한국에너지공과대학교(KENTECH)에 따르면 대학 이석주 교수 연구팀이 한국항공우주연구원(KARI), 한국천문연구원(KASI)과 공동으로 AI 기반 월면 3차원 지도 생성 기술인 'LNEM(Lunar Neural Elevation Model)'을 개발했다.
이번 연구 성과는 컴퓨터 비전 분야 최고 권위 국제학술대회인 CVPR 2026 정규 논문으로 채택돼 지난 5일 발표됐다.
최근 미국과 중국, 유럽 등을 중심으로 달 착륙과 자원 탐사 경쟁이 치열해지면서 정밀한 월면 지형정보 확보의 중요성이 커지고 있다.
달 착륙선의 안전한 착륙지 선정과 탐사 로버의 자율주행, 자원 탐사 임무 수행 등을 위해서는 고해상도 3차원 지도가 필수적이다.
연구팀이 개발한 LNEM은 실제 달 궤도에서 촬영한 영상을 바탕으로 달 표면의 높이와 지형을 3차원으로 복원하는 AI 기술이다.
기존 스테레오 정합 방식이 그림자가 많거나 지형 특징이 부족한 지역에서 정확도가 떨어졌던 한계를 보완했다.
특히 최신 AI 기술인 뉴럴 렌더링에 달 탐사선의 복잡한 촬영 환경을 반영하는 엄밀 센서 모델을 결합해 실제 탐사 환경에서도 높은 정확도를 확보했다는 점이 특징이다.
연구진은 세계 최초로 다누리(KPLO)와 나사(NASA)의 달 정찰 궤도선 LRO(Lunar Reconnaissance Orbiter)의 영상을 AI 학습에 적용했다. 기존 방식보다 최대 5~10배 높은 공간 해상도의 월면 지형 복원이 가능하다는 점을 확인했다.
아울러 양측 달 궤도선 데이터를 통합 활용할 수 있는 플랫폼 '루나 스튜디오(Lunar Studio)'도 구축했다.
이 플랫폼은 전문가 중심으로 활용되던 달 탐사 데이터를 AI 연구자들도 쉽게 활용할 수 있도록 설계돼 데이터 접근성과 연구 효율성을 높였다.
연구진은 이번 기술이 향후 달 착륙 위험지역 분석과 착륙 후보지 평가, 탐사 로버 자율주행 경로 설정, 지형 기반 항법 시스템 개발 등 미래 달 탐사의 핵심 인프라로 활용될 것으로 기대하고 있다.
이석주 교수는 "이번 연구는 실제 달 탐사선이 획득한 영상을 활용해 AI 기반으로 월면의 정밀 3차원 지형을 복원한 선도적인 연구"라며 "향후 대한민국의 우주 임무 수행에 필요한 핵심 지형정보 생성 기술로 발전시켜 자율 착륙, 로버 주행, 우주자원 탐사 등 다양한 분야에 기여할 수 있도록 연구를 지속해 나가겠다"고 말했다.
◎공감언론 뉴시스 [email protected]



